
Sujet d’interrogations fréquentes, la séparation de cible d’une sonde est une information cruciale. Nous avons décidé de lui dédier un article pour présenter assez profondément cette caractéristique ultra importante des sondeurs.
Définition de la séparation de cible pour les échosondeurs
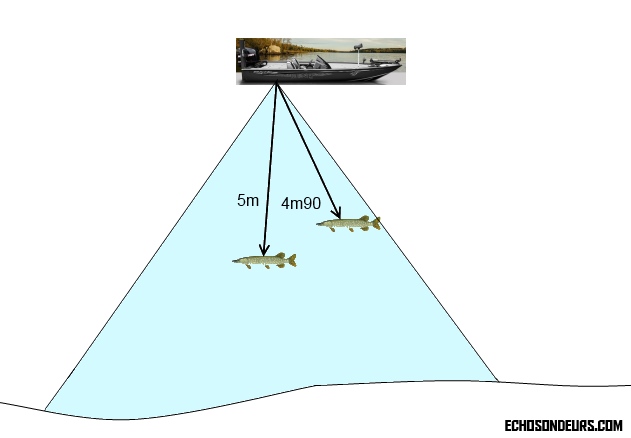
La séparation de cible détermine la capacité de l’échosondeur à distinguer les différentes cibles présentes dans l’eau. En d’autres termes, c’est la capacité du sondeur à afficher deux cibles séparées comme deux entités distinctes et non comme une seule et même cible.
Plus la séparation de cible est faible, plus la précision et la résolution de l’échosondeur sont élevées.
Plusieurs facteurs influencent la séparation de cible d’un échosondeur:
- La fréquence du sondeur: généralement, plus la fréquence est élevée, meilleure est la séparation de cible.
- La technologie utilisée: Un signal chirpé fait également baisser la séparation de cible.
On peut résumer ainsi la séparation de cibles:
– Plus petite est la séparation de cibles, meilleure est la précision.
– Un signal CHIRP améliore grandement la séparation de cibles.
– Une fréquence haute contribue à une meilleure séparation de cibles, inversement pour les fréquences basses.
Les sondes modernes comme les Garmin GT56UHD, Lowrance Active Target HD ou Humminbird Mega Imaging+ offrent des séparations de cible de 2 à 3 cm.

Pour consulter un article assez complet sur le fonctionnement général des sondeurs, rendez vous ici .
Quelques explications techniques, le coin des experts
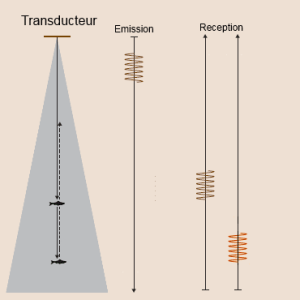
La distance minimale entre deux cibles est limitée par la durée d’impulsion (qui est l’unité de traitement minimale du sondeur).
Une salve d’ultrasons (ou impulsion) possède physiquement une longueur (en centimètres) entre le début et la fin d’émission des ultrasons.
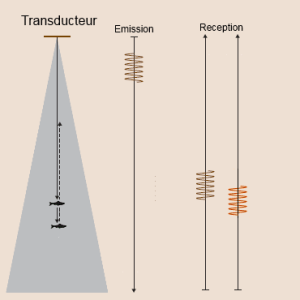
Le transducteur en mode réception ne peut traiter qu’une impulsion à la fois, il faut donc calculer la longueur (en centimètres) de l’impulsion qui est dépendante de la fréquence des ultra sons et de la vitesse de propagation du son dans l’eau. Si deux cibles sont trop proches, les deux échos retournés par les deux cibles vont se télescoper et le sondeur ne pourra pas les différencier, une seule cible apparaît à l’écran.
Cette distance est calculée par la formule classique de calcul de la distance (distance = vitesse x temps) dans notre cas: (Vitesse du Son x Longueur d’onde) / 2
On divise par deux pour tenir compte de l’aller retour de l’écho entre les deux cibles.
La seule variable que le sondeur maîtrise est la durée d’émission de la salve ultrasons, plus la fréquence est haute moins la longueur d’émission sera élevée et meilleure sera la précision.
Une fréquence de 200kHz va avoir une période de 1/200000 = 0.5µs et la fréquence 50kHz 1/50000 = 2µs par période. Si le sondeur émet des ultra sons constitués de 10 cycles (ou périodes/ ou sinusoïdes… valeur qui dépend de l’appareil, de la profondeur..), la longueur d’impulsion pour la fréquence 200kHz sera de 5µs et 50µs pour la fréquence 50kHz.
Il faut prendre maintenant en compte la vitesse du son dans l’eau qui est approximativement de 1500m/s.
Calculons la longueur d’onde pour les fréquences :
- 200kHz t = 1/200 000 x 10 = 0.00005 secondes.
- 50kHz t = 1/50000 x 10 = 0.0002 secondes.
La séparation de cible de la fréquence 200kHz est de 3.75 cm pour une longueur d’onde de 5µs. d = 1500 x 1/50000 x 10 / 2= 0.15 m = 15cm.
La séparation de cible de la fréquence 50kHz est de 15 cm pour une longueur d’onde de 50µs.
Comme la longueur d’onde est plus courte avec une haute fréquence, on obtient une plus grande précision.
La définition de l’écran autre facteur de précision
Avoir une séparation de cible basse c’est bien mais si la définition de votre écran est mauvaise, vous ne verrez pas vos poissons séparément !
Pour une résolution de 240 pixels de hauteur comme sur le Humminbird Piranha Max 175 sur une profondeur de 40 mètres, chaque pixel représentera 16.5cm de hauteur d’eau… autant dire qu’une séparation de cible de 6.5cm ne sert pas à grand chose dans ces conditions..


7 commentaires sur « Comprendre la séparation de cibles »